The microcontroller unit is the brain of the Pan-Tilt system and facilitates a CLI interface to the system as-well as controls the attached hardware using a joystick, through the means of a closed-loop feedback mechanism. The system is implemented using a super-loop structure with class-like modules and a central system process.
This project uses the RB-C99 1.0 coding conventions.
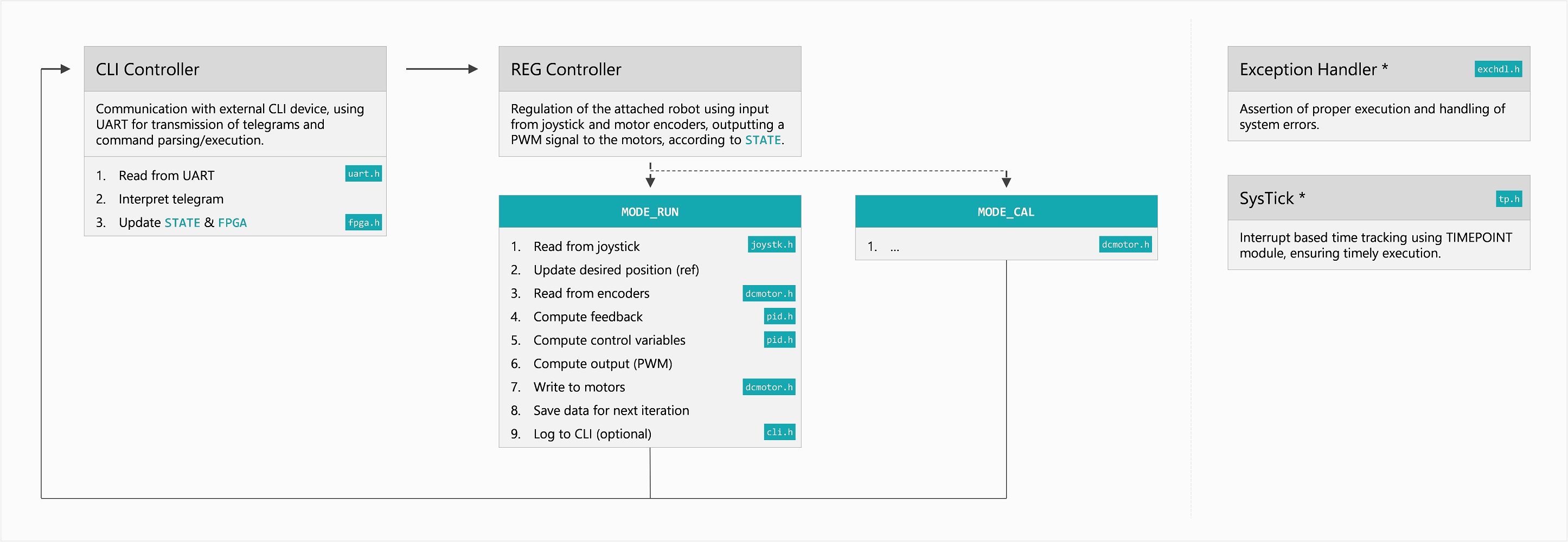
The main super-loop process consists of two primary stages; CLI communication followed by a FSM which in accordance with the selected system mode, determines how to regulate the attached Pan-Tilt hardware.
The MCU has is comprised of various modules, each with a specific purpose.
| Name | File | Description |
|---|---|---|
| DRIVER | driver.h |
MCU port access, interrupts, systick etc. |
| SYSTEM | sys.h |
System control, modes, get/set methods. |
exchdlr.h |
Exception handling with assert() & require() methods. |
|
| TIMEPOINT | tp.h |
Time tracking, duration calculation etc. |
| CHECKSUM | chksum.h |
Static checksum method collection. |
| UART | uart.h |
UART communication with telegram protocol. |
| SPI | spi.h |
SPI communication with telegram protocol. |
| CLI | cli.h |
Command interpretation, console logging. |
| MOTOR | mot.h |
Motor interface with encoder, PWM etc. |
| PID | pid.h |
PID computation class. |
Text.