This is the page for of SUSTech-Gardener😊, which is An autonomous mobile agricultural robot can collect agriculture-related information, as well as weeding and other work to serve the future agriculture.
Our team has won the only reward, the prize is DJI OSMO Mobile 4

Some picture about Gardener.
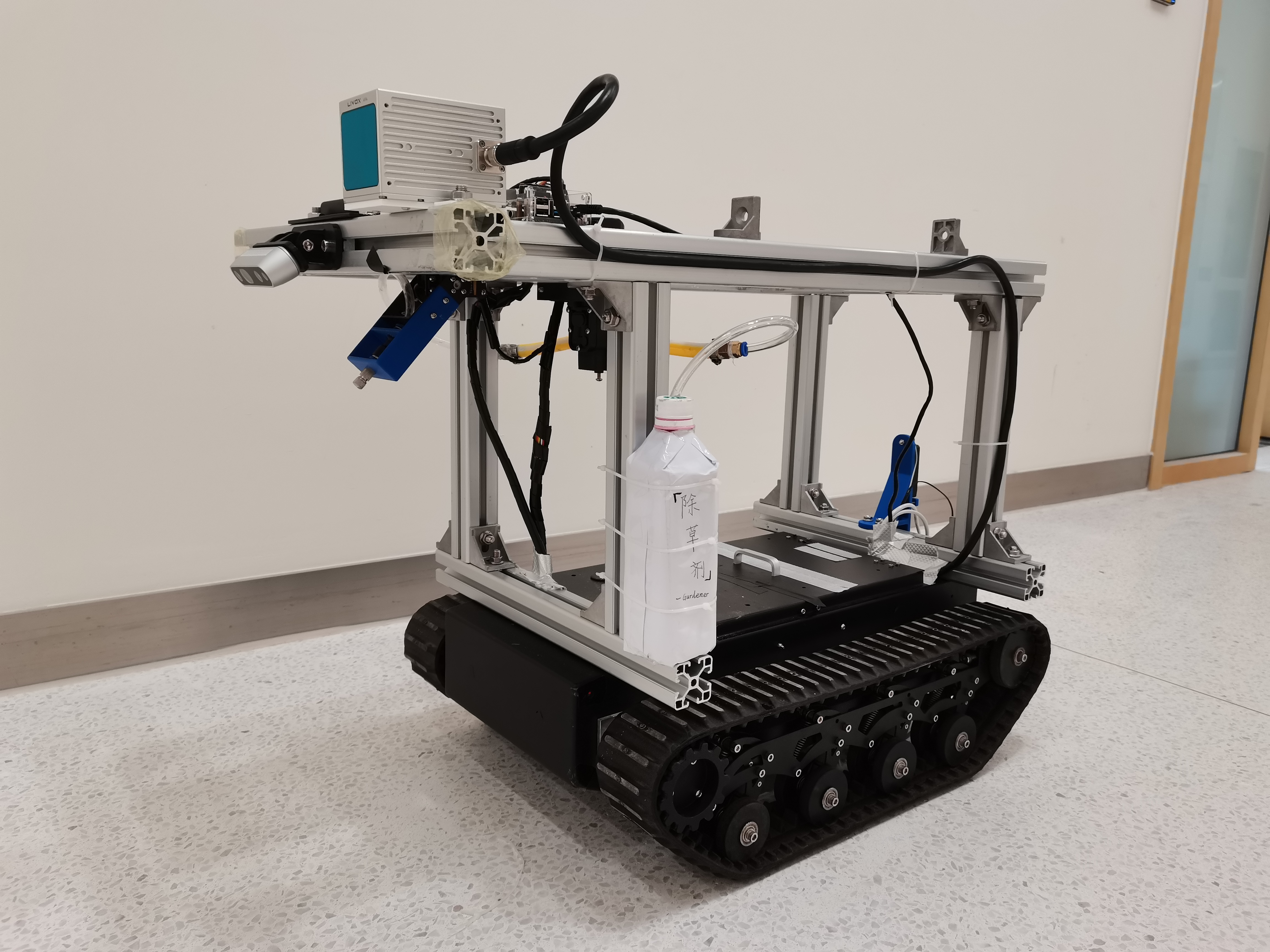
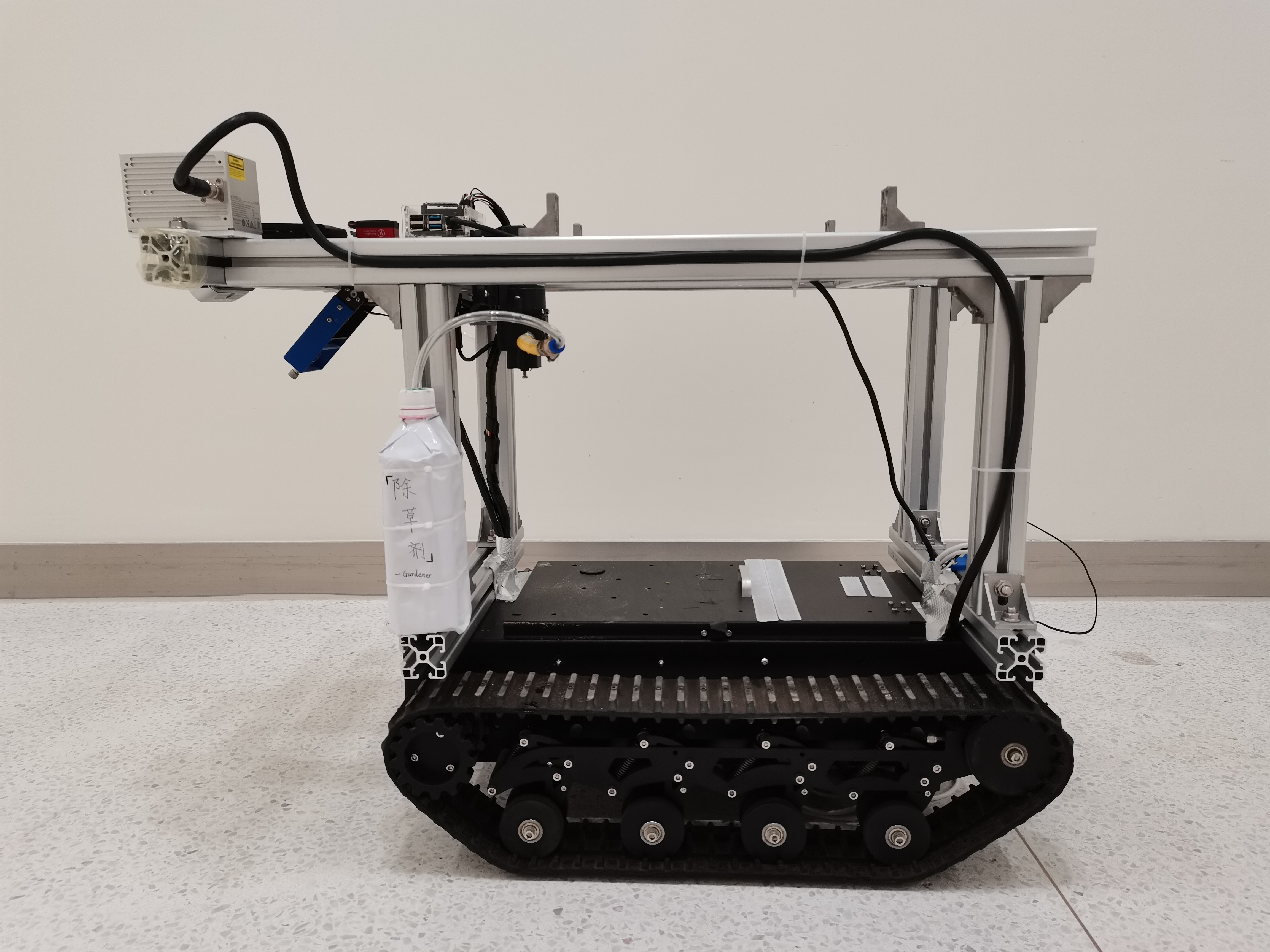

The whole project has these parts.
- Camera: Realsense D435i: https://www.intelrealsense.com/depth-camera-d435i
- Lidar: Livox avia: https://www.livoxtech.com/avia
- Soilsensor: https://github.com/SUSTech-Gardener/Gardener/tree/main/soilsensor
- Tracked car: In order to be able to operate on multiple terrain
- Sprinkler control
- Car bracket
- Soil sensor telescopic mechanism
- Motor
Ubuntu 64-bit 16.04 or 18.04. ROS Kinetic or Melodic. Follow ROS Installation.
In this part, Using YOLO V3 to detect weed and crop. The learning model we also transfer to ROS package, it is very easy to use.
- ROS package: https://github.com/SUSTech-Gardener/WeedDetection_ros
- Without ROS: https://github.com/SUSTech-Gardener/WeedDetection
- (Livox SLAM)[https://github.com/SUSTech-Gardener/car_relocalization]
- (Livox Autoware)https://github.com/SUSTech-Gardener/livox_autoware_driver
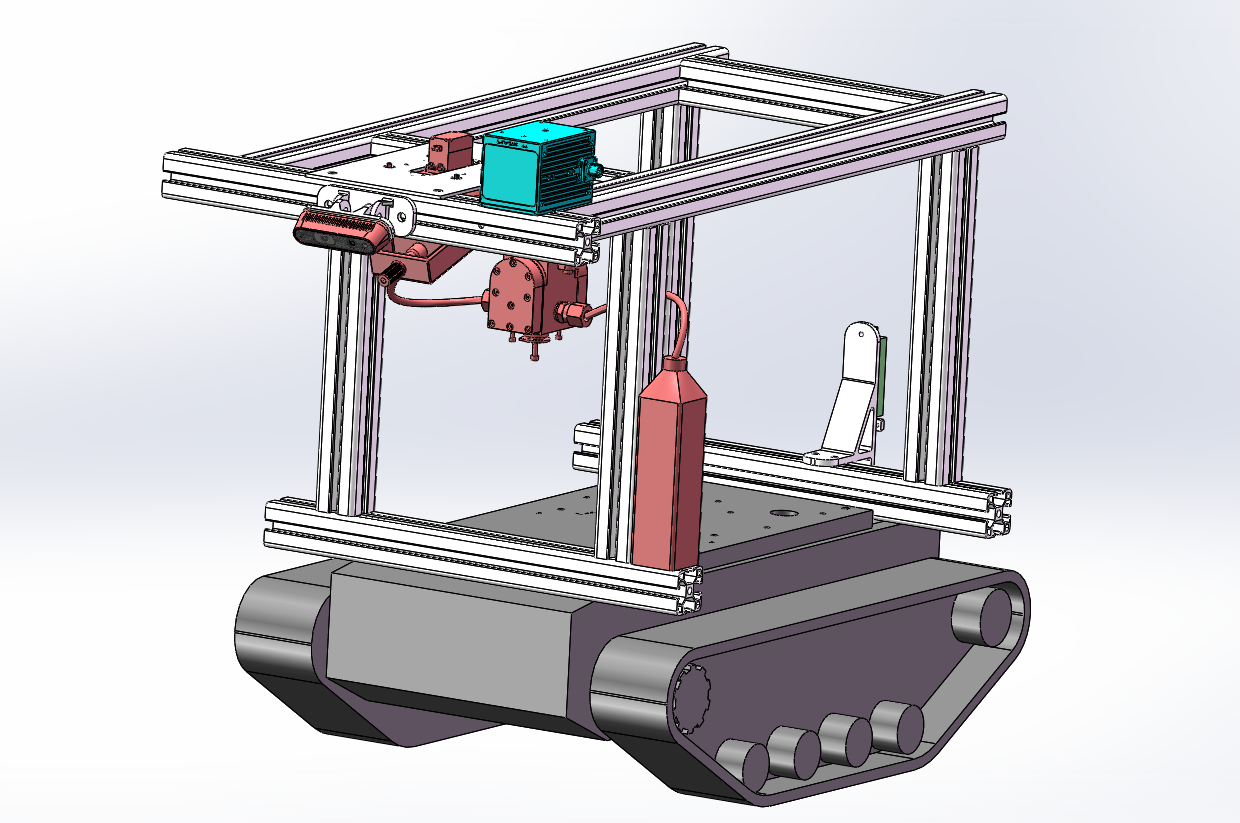
The whole 3d solidworks model is in the repository, contains these items:
- A some tracked car
- Some extended structure on the car
- Base for Livox lidar and RealSense camera D435i.
- The head of the sprinkler
- Livox lidar: for SLAM and navigation.
- D435i: detect weed and crop.
- Soil moisture sensor: add the soil moisture data in map(In soilsensor fold).
Follow other repository in this project.
- 购买物资(全程)
- 硬件部分:小车的速度,转向控制,(第3到第12周)
- 杂草识别的模型,第八周结束需要搞完(第4到第十周)
- SLAM和navigation(第九到第十六周)
- 机械硬件结构搭建和喷头系统的构建(第四到第十六周)
- 土壤检测器的插入设计及测试(第十三周)
- 最终的系统框架构建!!(✌)
- Shixing Jiang: Mechanical design, electrical selection and layout, video clip
- Qiaowen Wang: Mechanical design and tracking trolley control
- Haibiao Chen: electrical design and implementation, embedded system construction
- Hu Zhu: YOLO V3 for weed detection, coordination between components, Github Main maintenance.
- Wen Yang: Mapping, positioning and system communication
This work was supported by SUSTech Course (SDM 5002) , Professor Xiaoping Hong
Visits: